This is the blog section. It has two categories: News and Releases.
Files in these directories will be listed in reverse chronological order.
This is the multi-page printable view of this section. Click here to print.
This is the blog section. It has two categories: News and Releases.
Files in these directories will be listed in reverse chronological order.
On February 15, 2025 at 2 pm the next building workshop for CitRad sensors will take place. We want to build more sensors together with you to collect even more data from locations in and around Cottbus. Those who take part in this construction workshop can take the self-built sensor home with them as a permanent loan and collect traffic data. If the sensor is no longer actively used, you can simply return it to us. For space reasons, we can unfortunately only offer this to five people** on this day. It’s worth registering quickly.
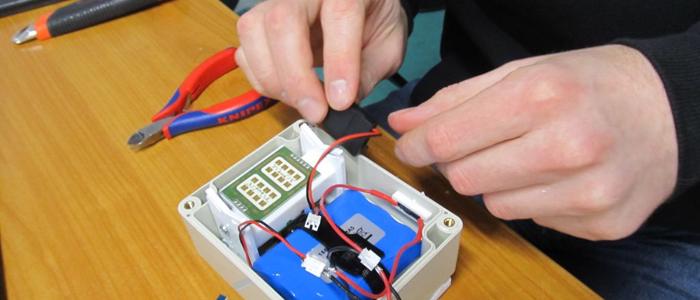
With a little dexterity, the CitRad sensor can be assembled in a reasonable amount of time.
13-approx. 17: We start at 13:00. Building the sensors will take 2-3 hours, depending on your individual pace. But because we also want to explain the further use and answer your questions in peace, it is better to take 4 hours.
We will meet at:
Fablab Cottbus
Walther-Pauer-Straße 7
03046 Cottbus
Unfortunately, we only have limited space in the lab. So that everyone can work well and be supervised by us, we limit the number of participants to 5 people. .
We look forward to your registration / your coming and are available for questions at any time .
At relatively short notice, four members of Fablab Cottbus agreed to help us test the building instructions and produce new CitRad sensors for traffic counting in Cottbus. All participants had different levels of experience, which promised us valuable feedback on the building instructions. And the expectations were fully met.

Careful reading of the instructions: In order to get to the finished sensor without any problems, the instructions had to be read in full and photos had to be examined more closely.
Without much preamble, the only clue we gave was our website. Everyone had to work out the rest for themselves without receiving any explanations from us. The first incompletenesses quickly became apparent, which as the author of the documentation you quickly lose sight of. However, it was much more interesting to see how well or poorly individual instructions and photos were understood by different people. This quickly resulted in helpful tips, which we were able to classify correctly with the feedback from the other participants.
The connection between the radar module and the rest of the electronics caused us the most concern beforehand. There are complex steps here, from the correct bending of pins to soldering in the tightest of spaces. Surprisingly, both experienced soldering specialists and people who were a bit out of practice got on well here. As a result, we are now confident that building the CitRad sensor will not be a frustrating experience for DIY enthusiasts and workshop participants alike, but a successful one.
After two to three hours, everyone was ready to flash the missing software onto the Teensy developer board. As this was not yet part of the instructions, we took over the flashing and equipped the CitRad sensors with the latest version of our evaluation algorithm. This means that the sensors are now ready to detect the number and speed of passing vehicles in both directions. For the sensor network in Cottbus, it also means four new CitRad modules that provide openly accessible traffic data. This not only pleases us, but also the participating new sensor sponsors.

Andres brought the most experience and in the end used the time to implement a few additional functions that were currently being tested.

Despite having soldering experience some time ago, Sarah dared to build the sensor and was able to complete the workshop with a sense of achievement without much effort.
After four months of development, the CitRad sensor is now ready to count vehicles and measure their speed. At the same time, we have largely finalized the building instructions for the sensor and also pushed ahead with the development of the data platform. Now it’s time to check whether our documentation is also comprehensible to outsiders. In a first construction workshop, we want to invite members of Fablab Cottbus e.V., where we developed the sensor unit, to a first test build. We will use the findings from this event to run another optimization loop and then offer further events for all interested parties.
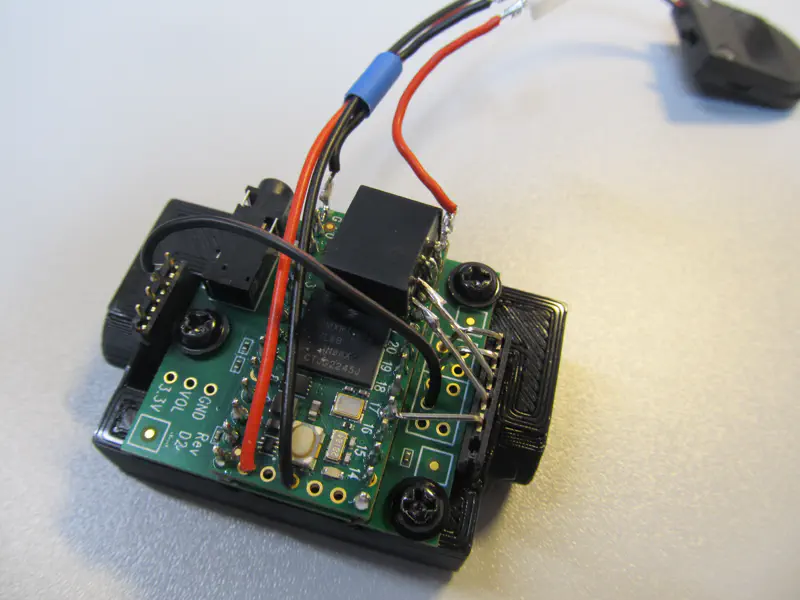
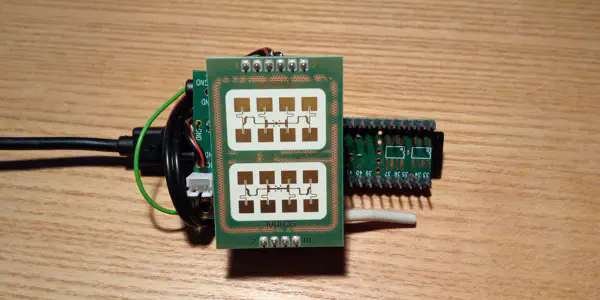
Once the required electronics have been assembled, the result is a compact package that only needs to be installed in the housing and connected to the battery.
Photo: Benedikt Stahl / CC-BY-CA
The central basis for data collection is a functioning sensor unit. Therefore, this first event serves primarily to check our building instructions for comprehensibility. The electronics are quite compact in their present form and the necessary soldering work is probably a little too demanding for absolute beginners. We are therefore particularly interested in those who want to help improve the instructions and have soldering experience. Participants may of course use the sensor units produced for initial test measurements. However, they will remain in our possession so that they are available for future measurement campaigns.
We will use the experience gained from the first test run to improve our instructions and then offer further construction workshops and announce them accordingly. If you want to have your own CitRad sensor, you can either order the parts yourself (and assemble them with our help) or come along to one of the future workshops and discuss possible options with us.
After we have developed an algorithm on the computer to analyze the radar data, the whole thing now has to be implemented on the device. Our goal is that all the data is already analyzed in the box and we only need to store the number of cars and their speed.
Compared to the evaluation on the computer, there are a few things that need to be done differently on the device: On the computer, we worked with recorded data. On the device, we do the analysis live. This means that we have to buffer values in some places. For example, for smoothing the noisy raw signal. In one direction of travel, we have to buffer the speeds until the trigger of a passing car arrives. Only then can we save the data. For cars traveling in the other direction, we receive a trigger and then have to wait for the speed data.
The evaluation should later run completely on our sensor unit.
In addition, there is still a lot to optimize in order to evaluate the data efficiently on the small computing core.
You can follow our development in the SensorUnit repository on github.
After all our experiments with amplifier circuits and a low-noise power supply, our sensor now seems to be working well. At least you can clearly see different vehicles in the spectral images of the radar data and recognize how fast they are driving. But how can the whole thing be evaluated with an algorithm? In the end, we just want to count vehicles and save the speed of each vehicle.
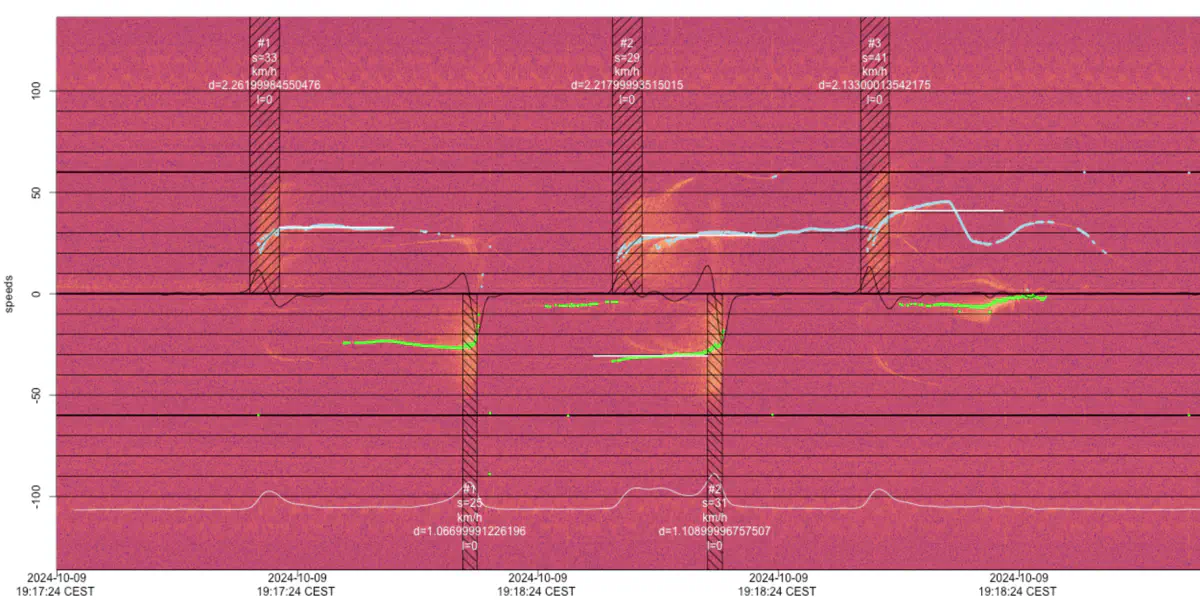
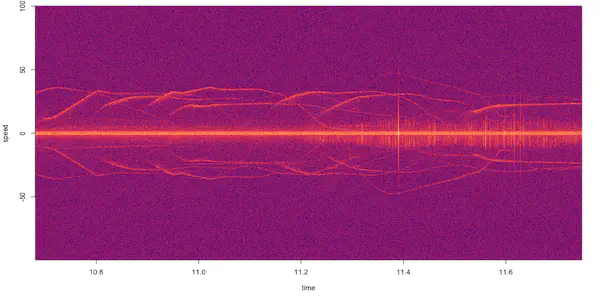
Data analysis on the computer. The algorithm counts cars and measures speeds.
Screenshot: Nanu Frechen / CC-BY-CA
The eye can easily distinguish the actual signal from the noise. In data analysis, this requires some smoothing and well-chosen limit values. The noise also changes over time. When the battery discharges. We also had to find a solution for this.
The signal analysis is based on the fact that certain frequencies stand out from the spectrum. This can be seen as lines over time. Each line is a moving object. A moving car, for example. The speed can then be calculated from the frequency.
We use a special trick to recognize when a car passes by: As the car passes, the angle to the Rarsensor changes. This causes the signal to bend downwards (towards 0 km/h). We recognize this bend and know that a car has just driven past the sensor. Whether this bend is to the left or to the right tells us in which direction the car was traveling. Now we just have to determine the detected speed before or after this trigger and save it.
What sounds simple is the result of a lot of fiddling around. And of course we first developed the whole thing on the computer using recorded data. This now has to be programmed and tested on the device itself. Only then will we be ready to give the device to interested parties for their own measurements. But that will be soon!
If you are interested in the technical details, you can take a look at our repository on github.
When we realized that we wanted to collect open traffic data and make it available for analysis, we quickly came to the question of how. Existing projects for the automated analysis of camera images were tempting, as they would have saved us a lot of basic development work. However, data protection-compliant traffic counting would not be possible. Because by recording people, license plates, etc., we would be operating in a legal grey area - even if we deleted this data immediately after evaluation. Radar does not have any of these data protection problems, but it does present additional challenges in terms of analysis.
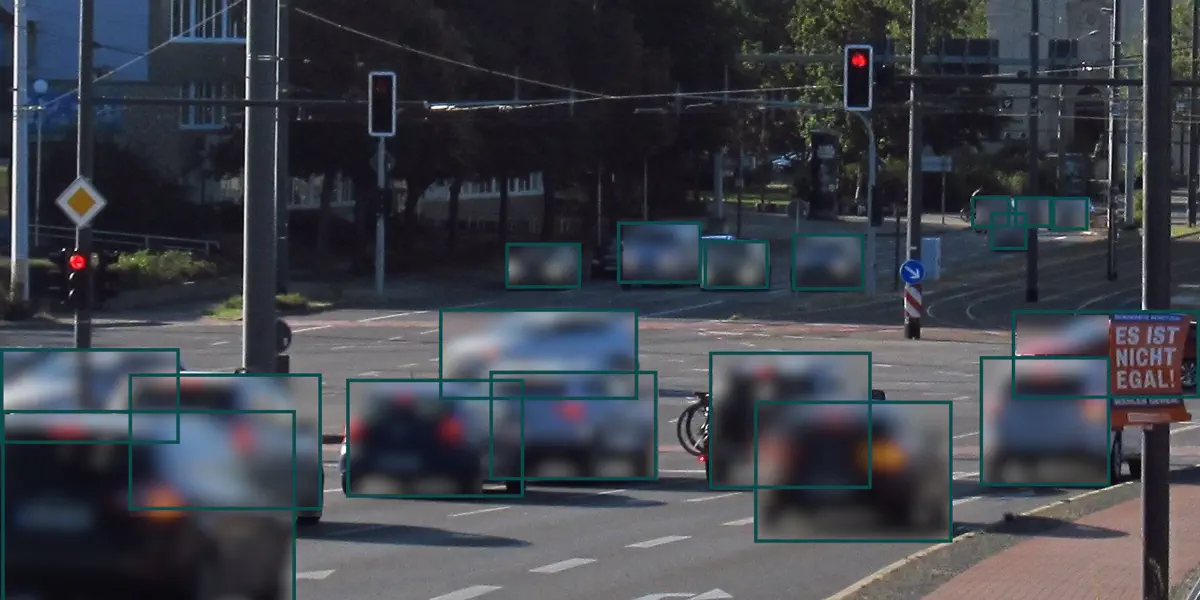
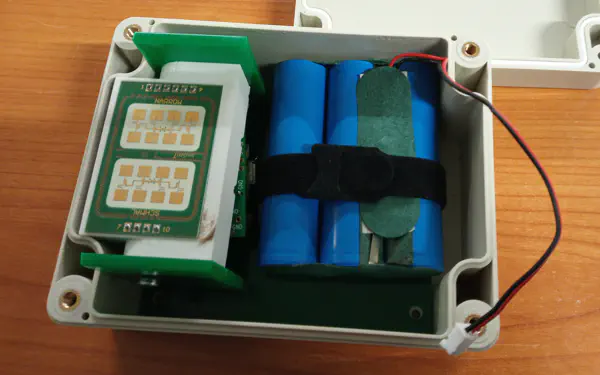
The radar only recognizes individual objects without capturing details. As if a camera could only record blurred road users.
Foto: Benedikt Stahl / CC-BY-CA
Radar technology works by emitting electromagnetic waves that are reflected by vehicles. By analyzing the reflected waves, the system can collect information about the traffic flow without collecting personal data. This ensures the anonymity of road users. In contrast, image-based systems can collect potentially sensitive information about the identity of drivers and passengers, which is not the case with radar technology.
As we are of the fundamental opinion that personal data should be kept out of data sets where not absolutely necessary, Radar was the ideal solution for us. Of course, a pleasant side effect was that we did not have to concern ourselves with GDPR compliance. Because even if the image data had only been analyzed on the microcontroller and no one had seen it, numerous problems would have remained unresolved. For example, how do you ensure that third parties cannot gain access to the devices and access raw data that has not yet been deleted? Will we have problems with acceptance of the system if people have the feeling that they are being recorded on camera just because they are driving along a road in accordance with the rules? We were able to put all these considerations aside with a clear conscience by using radar.
As far as radar technology itself is concerned, there are some advantages but also many challenges. Camera images are easy for people to grasp. This makes it much easier and quicker to check the evaluation mechanisms during development. Radar, on the other hand, provides us with a spectrum for evaluation that is very difficult for inexperienced viewers to decipher. The initial effort and interpretation of the results will therefore tend to take more time. In the long term, however, radar works more reliably than image analysis. Radar does not care what light conditions prevail. The reflected waves look the same in pitch darkness as they do in broad daylight. Different weather conditions are also no problem for radar. Fog, rain and snow should, at least in theory, be manageable as soon as the evaluation algorithm has been properly adjusted. We will describe how successful we are in doing this in the coming blog posts.
CitRad collects traffic data in compliance with data protection regulations and makes it available for further analysis. Nobody who drives past a CitRad sensor has to fear that data records will be created somewhere that will be associated with them. And there is certainly no need to fear points in Flensburg. Even if we detect speeding violations, we can only record them statistically and cannot draw any conclusions about the exact car or driver. Misuse of data is therefore also ruled out. As far as the accuracy of the evaluation is concerned, it will certainly take some time before we can include all eventualities in the evaluation. Until then, however, the CitRad sensor already provides good trends and quantitative overviews.
With an initial prototype that provides data, we were finally able to invite interested parties to take measurements. At the same time, we took the opportunity to present the project at thematically appropriate events such as the Car-Free University Day or the Parking Day in Cottbus.

First live measurements on Universitätsstraße
Photo: Nanu Frechen / CC-BY-CA
In order to collect initial comparative data, but also to pick up interested citizens, we were drawn to the roadside relatively quickly. Using our own bicycles and cargo bikes, we generated our own trajectories and were able to compare them with “normal” road traffic. Even here, important patterns emerged that were crucial for the subsequent evaluation routine.

At the Parking Day in Cottbus, CitRad (briefly renamed City Radar) met with great interest and approval.
Photo: Nanu Frechen / CC-BY-CA
To make CitRad better known to the city’s population, we also ventured to various city festivals. For example, visitors to the Karlstraßenfest were able to experience their own radar signature as a sound output.
At more topic-specific events such as the Car-Free University Day, we were able to exchange ideas with mobility researchers from BTU Cottbus-Senftenberg and exchange initial ideas on where and how CitRad can be particularly effective.
We were also represented with CitRad at Parking Day 2023. This event is dedicated to critically examining the space that cars take up in urban areas through parking alone and how this can be used as an alternative to improve the quality of life in cities. CitRad also met with an interested audience here. Our approach of bringing perceived truths back to facts was consistently perceived as an important first step.
The CitRad sensor had to be based on a radar sensor that was as inexpensive as possible but still reliable and easy to replicate. After a few tests, we chose the IPS-354 module from Innosent. We also needed a powerful microprocessor to process the signals from the sensor. Here we opted for the Teensy 4.0 in combination with the Teensy Audio Board, which is also available. The signal from the sensor can be processed with audio tools. The Audio System Design Tool and detailed Tutorials are available for this purpose. We were particularly interested in the fact that a spectral transformation (FFT) can be implemented. In contrast to other systems, the Teensy can continue to record data while it is doing the data processing so that we do not lose any data.
The very first hardware prototype
Photo: Nanu Frechen / CC-BY-CA
Initially, we were still convinced that we needed an amplifier circuit to be able to use the signal from the sensor. We tested various amplifier boards and even designed a completely custom board. In the end, however, we realized that we wouldn’t need any amplification at all if we used the 32bit Audio Library, which uses the full bandwidth of the digital converter on the audio board.
With a few jumper cables and connectors, we were now ready to assemble the very first prototype. Since laptop operation was planned at the beginning anyway, all components were supplied with power via USB cable and at the same time a data connection was established so that the data could be viewed. The results looked very promising!
First recorded data. The speed curves of several cars are visible.
Screenshot: Nanu Frechen / CC-BY-CA
Where do you start to make a meaningful contribution to the traffic turnaround? We pondered this for a few days at FabLab Cottbus. We quickly realized that we wanted to implement a joint project. With the participation of interested citizens from Cottbus and the surrounding area, a citizen science project was to be created that would collect traffic data and make it available to everyone for evaluation and, above all, as a basis for discussion on traffic-related decisions in the city of Cottbus.
It was not yet clear to us at the time how we wanted to collect this data. Our first thoughts were along the lines of AI-evaluated video images. Although this would not have been a technical problem, it would have raised unanswered questions and caused problems in terms of data protection.
It was a good thing that the FabLab brings together people with a wide range of knowledge. One of them had the necessary prior knowledge and the brilliant idea of using radar signals instead of video images. In one fell swoop, all data protection concerns were dispelled and the research for the best components for an initial prototype began.
Every good project also needs a good name. Since we wanted to stick to the idea of citizen science and the radar system was now the focus, we quickly agreed on an acronym of Citizen Science Traffic Radar.