This is the blog section. It has two categories: News and Releases.
Files in these directories will be listed in reverse chronological order.
Das ist eine für den Ausdruck optimierte Ansicht des gesamten Kapitels inkl. Unterseiten. Druckvorgang starten.
This is the blog section. It has two categories: News and Releases.
Files in these directories will be listed in reverse chronological order.
Nachdem wir am Computer einen Algorithmus zur Auswertung der Radar-Daten entwickelt haben muss das Ganze nun auf dem Gerät implementiert werden. Unser Ziel ist dass alle Daten schon in der Box ausgewertet werden und wir nur noch die Anzahl der Autos und deren Geschwindigkeit speichern.
Im Vergleich zur Auswertung am Computer gibt es da einiges was auf dem Gerät anders laufen muss: Am Computer haben wir mit aufgezeichneten Daten gearbeitet. Auf dem Gerät machen wir die Auswertung live. Das bedeutet dass wir an einigen Stellen Werte zwischenspeichern müssen. Zum Beispiel für die Glättung des verrauschten Rohsignals. In der einen Fahrtrichtung müssen wir die Geschwindikgeiten zwischenspeichern bis der Trigger eines vorbeifahrenden Autos kommt. Erst dann können wir die Daten speichern. Bei den Autos der anderen Fahrtrichtung bekommen wir einen Trigger und müssen dann auf die Geschwindigkeitsdaten warten.
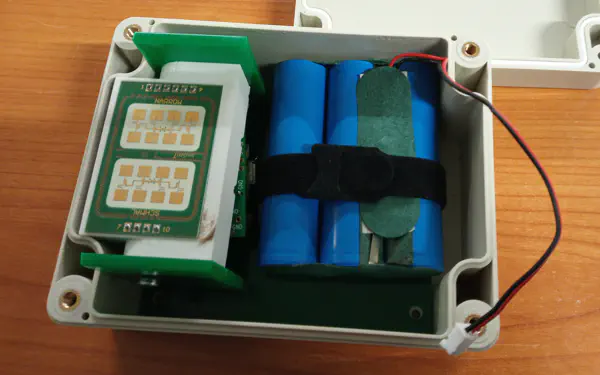
Die Auswertung soll später vollständig auf unserer Sensor-Einheit laufen.
Ausserdem gibt es noch einiges zu optimieren um die Daten effizient auf dem kleinen Rechenkern auszuwerten.
Unsere Entwicklung könnt ihr im SensorUnit repository auf github nachverfolgen.
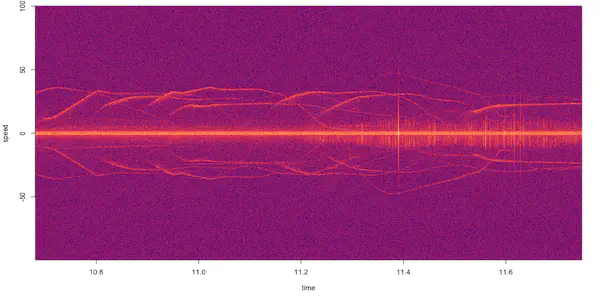
Nach all unseren Experimenten mit Verstärkerschaltungen und rauscharmer Stromversorgung scheint unser Sensor jetzt gut zu funktionieren. Zumindest kann man in den Spektralbildern der Radardaten sehr deutlich verschiedene Fahrzeuge sehen und erkennen wie schnell sie fahren. Aber wie lässt sich das Ganze mit einem Algorithmus auswerten? Schließlich wollen wir zum Schluss nur noch Fahrzeuge zählen und die Geschwindigkeit von jedem Fahrzeug abspeichern.
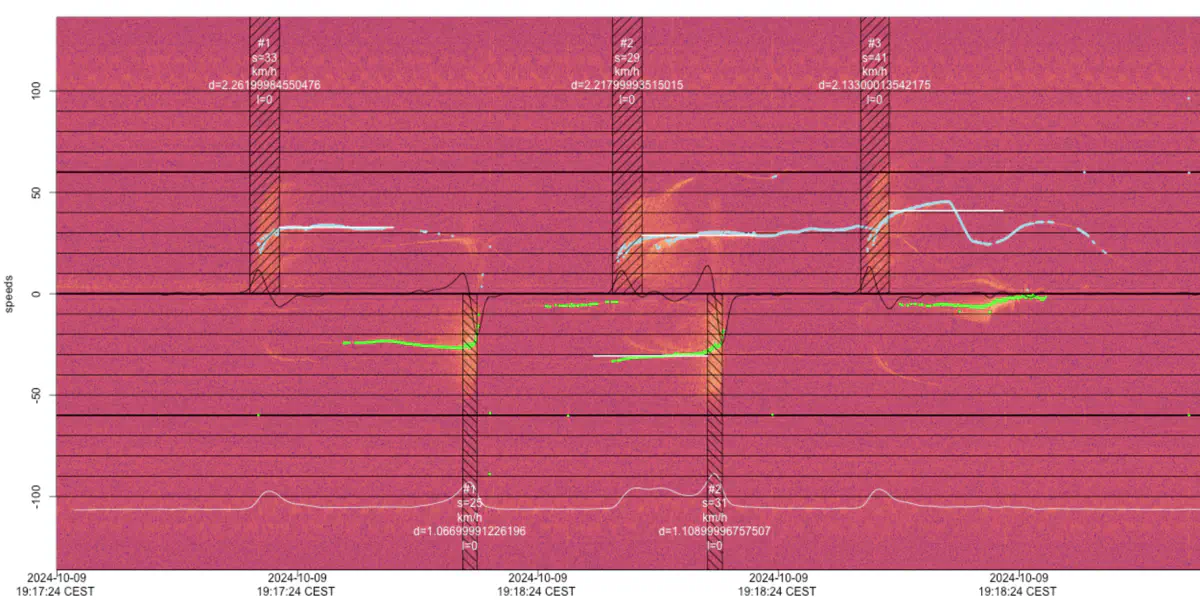
Datenanalyse am Computer. Der Algorithmus zählt Autos und misst Geschwindigkeiten.
Screenshot: Nanu Frechen / CC-BY-CA
Das Auge kann leicht das eigentliche Signal vom Rauschen unterscheiden. In der Datenauswertung braucht man dafür einiges an Glättung und gut gewählter Grenzwerte. Ausserdem verändert sich das Rauschen auch mit der Zeit. Wenn der Akku sich entlädt. Auch dafür mussten wir eine Lösung finden.
Die Signalanalyse basiert darauf, dass bestimmte Frequenzen aus dem Spektrum herausstechen. Das kann man als Linien im Zeitverlauf sehen. Jede Linie ist ein sich bewegendes Objekt. Ein fahrendes Auto zum Beispiel. Aus der Frequenz kann man dann die Geschwindigkeit berechnen.
Mit einem besonderen Trick erkennen wir wann ein Auto vorbei fährt: Im Vorbeifahren ändert sich der Winkel zum Rarsensor. Dadurch knickt das Signal nach unten ab (Richtung 0km/h). Diesen Knick erkennen wir und wissen dass gerade ein Auto am Sensor vorbei gefahren ist. Ob dieser Knick links rum oder rechtsrum passiert sagt uns in welche Richtung das Auto gefahren ist. Nun müssen wir nur noch vor oder nach diesem Trigger die detektierte Geschwindigkeit ermitteln und abspeichern.
Was sich einfach anhört ist das Ergebnis einer Menge Tüftelei. Und natürlich haben wir das Ganze erstmal am Computer mit aufgezeichneten Daten entwickelt. Das muss nun auf das Gerät selbst programmiert und getestet werden. Erst dann sind wir so weit dass wir das Gerät Interessierten für eigene Messungen in die Hand geben können. Das wird aber bald soweit sein!
Wer an den technischen Details interessiert ist kann sich das Ganze in unserem Repository auf github anschauen.
Es ist Sommer 2024 und wir blicken auf ereignisreiche 12 Monate Hardwareentwicklung zurück. Auch wenn die Hardware in dieser Zeit gut reifen konnte, noch mehr reifte unsere Überzeugung, dass CitRad eine gute Idee ist. Damit unsere Radargerät wirklich Verkehrsverhältnisse verbessern kann, musste zu guter Hard- auch gute Software kommen. Also steckten wir die Köpfe zusammen und überlegten, wie wir CitRad aufs nächste Leven heben könnten. Auch nach Fördermöglichkeiten schauten wir uns um. Eine davon war der Prototype Fund. “Wir fördern Public Interest Tech” ist deren Slogan. Da fühlten wir uns gut aufgehoben. Die Bewerbungsanforderungen waren erfrischend niederschwellig und das Förderkonzept sehr innovationsfreundlich. Wir schickten also die Bewerbung los und warteten…
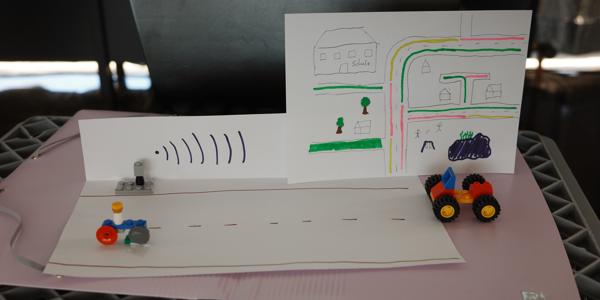
Citrad in a nutshell. Als Teil des Kickoff-Workshops sollte sich jedes Projekt "kreativ" vorstellen. Das war unser Ergebnis :-)
Photo: Prototype Fund / CC-BY-CA
Als Wochen später die Einladung zum Antragworkshop bei uns eintrudelte, war klar, dass CitRad eines von 25 geförderten Projekte der 16. Runde des Prototypfunds sein wird. Gemeinsam mit den Menschen beim Prototypefund ging es jetzt also darum, den offiziellen Förderantrag beim Bundesministerium für Bildung und Forschung vorzubereiten und einzureichen.
Auch diese Hürde haben wir am Ende genommen, und wurden am 2. September zur Kickoff-Veranstaltung nach Berlin eingeladen. Dort lernten wir die anderen 24 Projekte kennen und konnten wichtige Kontakte knüpfen. Außerdem gabs wichtige Infos zur Förderphase und tags drauf die Präsentationen der Projekte der vorausgegangenen Förderrunde.
Wir freuen uns jetzt intensiv entwickeln zu können und freuen uns auf die nächsten sechs Monate!
Mit einem ersten Prototypen, der Daten liefert, konnten wir endlich Interessierte zu Messungen einladen. Gleichzeitig nutzen wir die Chance, das Projekt auf thematisch passenden Veranstaltungen wie dem Autofreien Hochschultag oder dem Parking Day in Cottbus vorzustellen.

Erste Livemessungen an der Universitätsstraße
Photo: Nanu Frechen / CC-BY-CA
Um erste Vergleichsdaten zu sammeln, aber auch um interessierte Bürger:innen abzuholen, zog es uns relativ schnell an den Straßenrand. Mit eigenen Fahr- und Lastenräder erzeugten wir eigene Verlaufskurven und konnten diese mit dem “normalen” Straßenverkehr vergleichen. Schon hier ergaben sich wichtige Muster die für die spätere Auswerteroutine entscheidend waren.

Beim Parking Day in Cottbus stieß CitRad (kurzzeitig in City Radar umbenannt) auf großes Interesse und Zuspruch.
Photo: Nanu Frechen / CC-BY-CA
Um CitRad in der Stadtbevölkerung bekannter zu machen, trauten wir uns auch auf diverse Stadtfeste. So konnten Besucher des Karlstraßenfestes ihre eigene Radarsignatur als Tonausgabe erleben.
Auf themenspezifischeren Veranstaltungen wie dem Autofreien Hochschultag kamen wir in Austausch mit Mobilitätsforscher:innen der BTU Cottbus-Senftenberg und konnten erste Ideen austauschen wo und wie CitRad besonders effektiv wirken kann.
Beim Parking Day 2023 waren wir mit CitRad ebenfalls vertreten. Diese Veranstaltung widmet sich der kritischen Auseinandersetzung mit dem Platz, den Autos im Stadtgebiet alleine durchs Parken einnehmen und wie dieser alternativ zur Verbesserung der Lebensqualität in den Städten genutzt werden kann. Auch hier stoß CitRad auf interessierte Ohren. Unser Ansatz gefühlte Wahrheiten auf Fakten zurückzuholen, wurde durchweg als wichtiger erster Schritt wahrgenommen.
Der CitRad Sensor sollte auf einem möglichst günstigen aber trotzdem zuverlässigen Radarsensor aufbauen und mit einfachen Mitteln nachzubauen sein. Nach einigen Tests fiel unsere Wahl auf das IPS-354 Modul von Innosent. Ausserdem brauchten wir einen leistungsstarken Mikroprozessor um die Signale des Sensors zu verarbeiten. Hier entschieden wir uns für den Teensy 4.0 in Kombination mit dem dazu erhältlichen Teensy Audio Board. Das Signal des Sensors lässt sich nämlich mit Audio-Tools verarbeiten. Dazu gibt es das Audio System Design Tool und ausführliche Tutorials. Für uns war vor allem von Interesse dass sich damit eine Spektral-Transformation (FFT) umsetzen lässt. Im Gegensatz zu anderen Systemen kann der Teensy weiter Daten aufzeichnen, während er die Datenverarbeitung macht, sodass uns keine Daten verlorgen gehen.
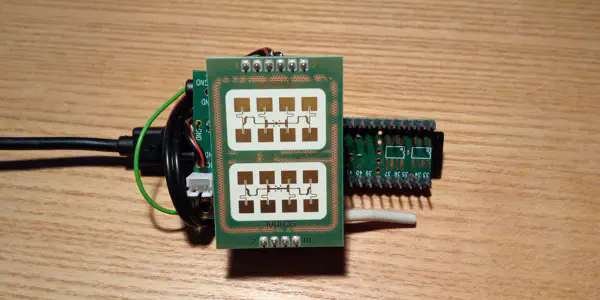
Der allererste Hardware-Prototyp
Photo: Nanu Frechen / CC-BY-CA
Anfangs waren wir noch überzeut, dass wir eine Verstärkerschaltung brauchen, um das Signal des Sensors nutzen zu können. Hier haben wir verschiedene Verstärkerplatinen getestet und sogar eine komplett eigene Platine entworfen. Zum Schluss haben wir aber gemerkt, dass wir gar keine Verstärkung brauchen, wenn wir die 32bit Audio Library verwenden, die die volle Bandbreite des Digitalwandlers auf der Audio-Platine nutzt.
Mit ein paar Jumperkabeln und Steckleisten konnte es jetzt an den Zusammenbau des allerersten Prototypen gehen. Da zu Beginn ohnehin der Laptop-Betrieb vorgesehen war, wurden alle Komponenten per USB-Kabel mit Strom versorgt und gleichzeitig eine Datenverbindung hergestellt um sich die Daten anschauen zu können. Die Ergebnisse sahen vielversprechend aus!
Erste aufgezeichnete Daten. Die Geschwindigkeitsverläufe mehrerer Autos sind sichtbar.
Screenshot: Nanu Frechen / CC-BY-CA
An welcher Stelle setzt man an, um einen sinnvollen Beitrag zur Verkehrswende beizusteuern? Darüber brüteten wir ein paar Tage lang im FabLab Cottbus. Uns war schnell klar, dass wir ein gemeinschaftliches Projekt umsetzen wollen. Mit der Beteiligung interessierte Bürger:innen aus Cottbus und Umgebung sollte ein Citizen Science Projekt entstehen, das Verkehrsdaten sammelt und für alle zur Auswertung und vor allem als Diskussionsgrundlage für Verkehrstechnische Entscheidungen in der Stadt Cottbus zur Verfügung stehen sollte.
Auf welche Art und Weise wir diese Daten erheben wollten, war uns zu diesem Zeitpunkt noch nicht klar. Erste Überlegungen gingen in die Richtung KI-ausgewerteter Videobilder. Das wäre zwar technisch kein Problem gewesen, hätte aber angesichts des Datenschutzes offene Fragen und Probleme mit sich gebracht.
Es traf sich gut, dass im FabLab Menschen mit den verschiedensten Kenntnissen zusammenkommen. Einer hatte das nötige Vorwissen und die zündende Idee, statt auf Videobilder auf Radarsignale zu setzen. Mit einem Schlag waren alle Datenschutzbedenken ausgeräumt und die Recherche nach den besten Bauteilen für einen ersten Prototypen begann.
Jedes gute Projekt braucht aber auch einen guten Namen. Da wir am Citizen Science Gedanken festhalten wollten und nun das Radarsystem im Zentrum stand, einigten wir uns schnell auf ein Akronym von Citizen Science Traffic Radar.