Das ist eine für den Ausdruck optimierte Ansicht des gesamten Kapitels inkl. Unterseiten. Druckvorgang starten.
News
- Erfolgreicher erster Bauworkshop
- Erster Bauworkshop im Fablab Cottbus
- Smarte Radar-Einheit
- Datenanalyse
- Datenschutzkonforme Verkehrszählung
- CitRad startet beim Prototyp Fund
Erfolgreicher erster Bauworkshop
Relativ kurzfristig erklärten sich vier Personen aus dem Mitgliederkreis des Fablab Cottbus bereit, uns beim Test der Bauanleitung und der Herstellung neuer CitRad-Sensoren für die Verkehrszählung in Cottbus zu unterstützen. Alle Teilnehmenden hatten unterschiedliche Erfahrungslevel, was uns wertvolles Feedback zur Bauanleitung versprach. Und die Erwartungen wurden voll erfüllt.

Gewissenhaftes Lesen der Anleitung: Um problemlos zum fertigen Sensor zu kommen, mussten sowohl Anweisungstexte vollständig gelesen als auch Fotos genauer betrachtet werden.
Viele Hinweise aus verschiedenen Blickwinkeln
Ohne langes Vorgeplänkel gaben wir als einzigen Hinweis unsere Website bekannt. Den Rest sollten sich alle selbst erarbeiten, ohne von uns Erklärungen zu erhalten. Ganz schnell vielen die ersten Unvollständigkeiten auf, für die man als Autor der Dokumentation schnell den Blick verliert. Viel interessanter war jedoch, wie gut oder schlecht einzelne Anweisungen und Fotos von unterschiedlichen Leuten verstanden wurden. So kamen schnell hilfreiche Hinweise zusammen, die man mit dem Feedback der anderen Teilnehmenden direkt richtig einordnen konnte.
Knackpunkt Löten
Im Vorfeld am meisten Sorgen bereitete uns die Verbindung des Radarmoduls mit dem Rest der Elektronik. Hier gibt es komplexe Schritte vom richtigen Biegen von Pins bis hin zum Löten auf engstem Raum. Erstaunlicherweise kamen hier sowohl erfahrene Lötspezialisten als auch Leute, die schon etwas aus der Übung waren gut zurecht. Weswegen wir nun zuversichtlich sind, dass das Bauen des CitRad-Sensors für Selbstbauer als auch Workshopteilnehmer in Zukunft kein Frust- sondern ein Erfolgserlebnis sein wird.
Fertig für den Einsatz auf der Straße
Nach zwei bis drei Stunden waren alle soweit, dass nur noch die fehlende Software auf das Teensy-Entwicklerboard geflasht werden musste. Da das noch nicht Teil der Anleitung war, übernahmen wir das Flashen und statteten die CitRad-Sensoren mit der neuesten Version unseren Auswertealgorithmus aus. Damit sind die Sensoren jetzt bereit, die Anzahl und Geschwindigkeit der vorbeifahrenden Fahrzeuge in beiden Fahrtrichtungen zu erkennen. Für das Sensor Netzwerk in Cottbus bedeutet es außerdem vier neue CitRad-Module die für offen zugängliche Verkehrsdaten sorgen. Das freut nicht nur uns, sondern auch die teilnehmenden frisch gebackenen Sensorpaten.

Andres brachte am meisten Erfahrung mit und nutzte am Ende die Zeit für die Implementierung ein paar im Test befindlicher Zusatzfunktionen.

Sarah traute sich trotz etwas länger zurückliegender Löterfahrung an den Sensorbau und konnte den Workshop ohne große Mühen mit einem Erfolgserlebnis abschließen.
Erster Bauworkshop im Fablab Cottbus
Nach vier Monaten Entwicklungszeit ist der CitRad-Sensor so weit, dass er Fahrzeuge zählen und deren Geschwindigkeit messen kann. Parallel dazu haben wir die Bauanleitung für den Sensor größtenteils finalisiert und auch die Entwicklung der Datenplattform vorangetrieben. Nun ist es Zeit zu überprüfen ob unsere Dokumentation auch für Außenstehende nachvollziehbar ist. In einem ersten Bauworkshop wollen wir Mitglieder des Fablab Cottbus e.V., wo wir die Sensoreinheit entwickelt haben, zu einem ersten Probebauen einladen. Mit den Erkenntnissen aus dieser Veranstaltung werden wir nochmal eine Optimierungsschleife drehen und dann weitere Veranstaltungen für alle Interessierten anbieten.
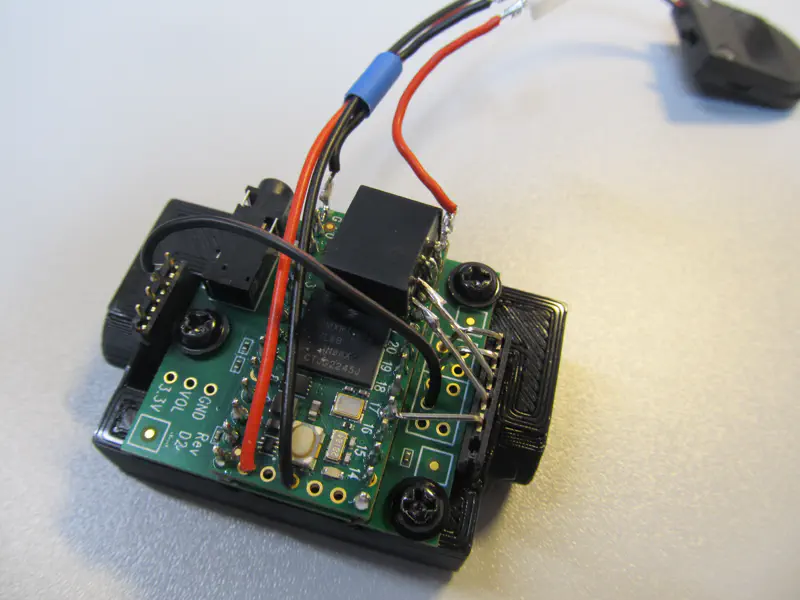
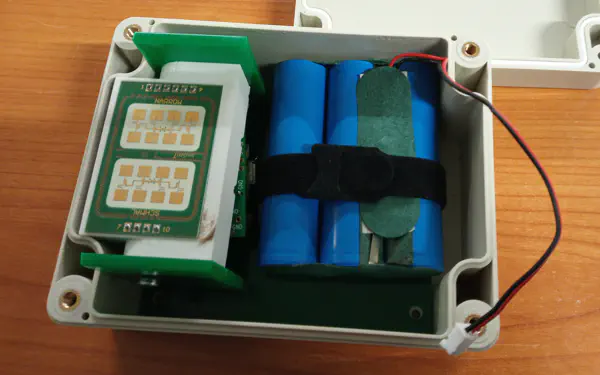
Wenn die benötigte Elektronik zusammengebaut ist, entsteht ein kompaktes Paket, das nur noch ins Gehäuse eingebaut und an den Akku angeschlossen werden muss.
Foto: Benedikt Stahl / CC-BY-CA
Fokus und Vorrausetzungen des ersten Bauworkshops
Zentrale Grundlage der Datensammlung ist eine funktionierende Sensoreinheit. Daher dient diese erste Veranstaltung vorallem dazu, unsere Bauanleitung auf Verständlichkeit zu überprüfen. Die Elektronik ist in der jetzt vorliegenden Form ziemlich kompakt, die notwendigen Lötarbeiten sind für absolute Anfänger vermutlich etwas zu anspruchsvoll. Angesprochen sind daher vor allem Interessierte die an der Verbesserung der Anleitung mitwirken wollen und Löterfahrung besitzen. Die hergestellten Sensoreinheiten dürfen die Teilnehmer:innen natürlich für erste Testmessungen nutzen. Sie bleiben allerdings in unserem Besitz, um sie für zukünftige Messkampagnen zur Verfügung zu haben.
Weitere Möglichkeiten, an einen CitRad-Sensor zu kommen
Mit den Erfahrungen aus dem ersten Testlauf werden wir unsere Anleitungen verbessern und dann auch weitere Bauworkshops anbieten und diese entsprechend ankündigen. Wer seinen eigenen CitRad-Sensor besitzen will, kann einerseits die Teile selbst bestellen (und mit unsere Hilfe) zusammenbauen, oder zu einem der künftigen Workshops vorbeikommen und mögliche Optionen mit uns absprechen.
Smarte Radar-Einheit
Nachdem wir am Computer einen Algorithmus zur Auswertung der Radar-Daten entwickelt haben muss das Ganze nun auf dem Gerät implementiert werden. Unser Ziel ist dass alle Daten schon in der Box ausgewertet werden und wir nur noch die Anzahl der Autos und deren Geschwindigkeit speichern.
Im Vergleich zur Auswertung am Computer gibt es da einiges was auf dem Gerät anders laufen muss: Am Computer haben wir mit aufgezeichneten Daten gearbeitet. Auf dem Gerät machen wir die Auswertung live. Das bedeutet dass wir an einigen Stellen Werte zwischenspeichern müssen. Zum Beispiel für die Glättung des verrauschten Rohsignals. In der einen Fahrtrichtung müssen wir die Geschwindikgeiten zwischenspeichern bis der Trigger eines vorbeifahrenden Autos kommt. Erst dann können wir die Daten speichern. Bei den Autos der anderen Fahrtrichtung bekommen wir einen Trigger und müssen dann auf die Geschwindigkeitsdaten warten.
Die Auswertung soll später vollständig auf unserer Sensor-Einheit laufen.
Ausserdem gibt es noch einiges zu optimieren um die Daten effizient auf dem kleinen Rechenkern auszuwerten.
Unsere Entwicklung könnt ihr im SensorUnit repository auf github nachverfolgen.
Datenanalyse
Nach all unseren Experimenten mit Verstärkerschaltungen und rauscharmer Stromversorgung scheint unser Sensor jetzt gut zu funktionieren. Zumindest kann man in den Spektralbildern der Radardaten sehr deutlich verschiedene Fahrzeuge sehen und erkennen wie schnell sie fahren. Aber wie lässt sich das Ganze mit einem Algorithmus auswerten? Schließlich wollen wir zum Schluss nur noch Fahrzeuge zählen und die Geschwindigkeit von jedem Fahrzeug abspeichern.
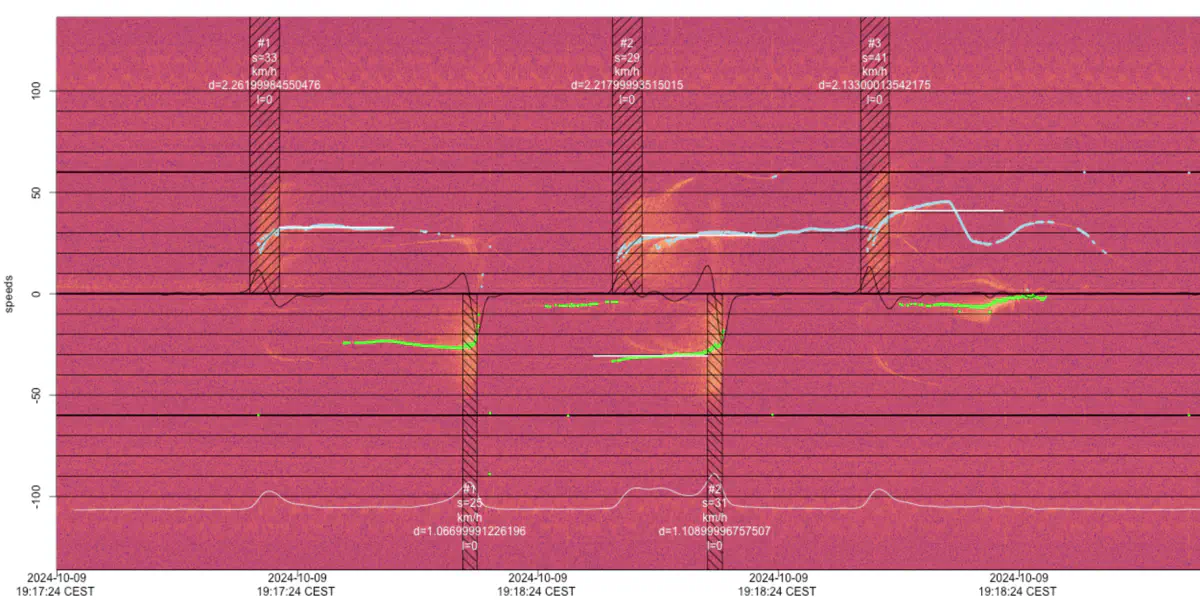
Datenanalyse am Computer. Der Algorithmus zählt Autos und misst Geschwindigkeiten.
Screenshot: Nanu Frechen / CC-BY-CA
Das Auge kann leicht das eigentliche Signal vom Rauschen unterscheiden. In der Datenauswertung braucht man dafür einiges an Glättung und gut gewählter Grenzwerte. Ausserdem verändert sich das Rauschen auch mit der Zeit. Wenn der Akku sich entlädt. Auch dafür mussten wir eine Lösung finden.
Die Signalanalyse basiert darauf, dass bestimmte Frequenzen aus dem Spektrum herausstechen. Das kann man als Linien im Zeitverlauf sehen. Jede Linie ist ein sich bewegendes Objekt. Ein fahrendes Auto zum Beispiel. Aus der Frequenz kann man dann die Geschwindigkeit berechnen.
Mit einem besonderen Trick erkennen wir wann ein Auto vorbei fährt: Im Vorbeifahren ändert sich der Winkel zum Rarsensor. Dadurch knickt das Signal nach unten ab (Richtung 0km/h). Diesen Knick erkennen wir und wissen dass gerade ein Auto am Sensor vorbei gefahren ist. Ob dieser Knick links rum oder rechtsrum passiert sagt uns in welche Richtung das Auto gefahren ist. Nun müssen wir nur noch vor oder nach diesem Trigger die detektierte Geschwindigkeit ermitteln und abspeichern.
Was sich einfach anhört ist das Ergebnis einer Menge Tüftelei. Und natürlich haben wir das Ganze erstmal am Computer mit aufgezeichneten Daten entwickelt. Das muss nun auf das Gerät selbst programmiert und getestet werden. Erst dann sind wir so weit dass wir das Gerät Interessierten für eigene Messungen in die Hand geben können. Das wird aber bald soweit sein!
Wer an den technischen Details interessiert ist kann sich das Ganze in unserem Repository auf github anschauen.
Datenschutzkonforme Verkehrszählung
Als uns klar war, dass wir ein offener Verkehrsdaten sammel und zur Analyse bereitstellen woollen, landeten wir schnell bei der Frage nach dem wie. Existierende Projekte zur automatisierten Auswertung von Kamerabildern waren verlockend, da sie uns viel Grundlagenentwicklung erspart hätten. Datenschutzkonforme Verkehrszählung wäre damit allerdings nicht möglich. Denn durch das Aufzeichnen von Personen, Kennzeichen etc. würden wir uns - auch wenn wir diese Daten direkt nach der Auswertung gelöscht hätten - in einer rechtlichen Grauzone bewegen. Radar hat all diese Datenschutzprobleme nicht, bringt aber zusätzliche Herausforderungen bei der Auswertung.
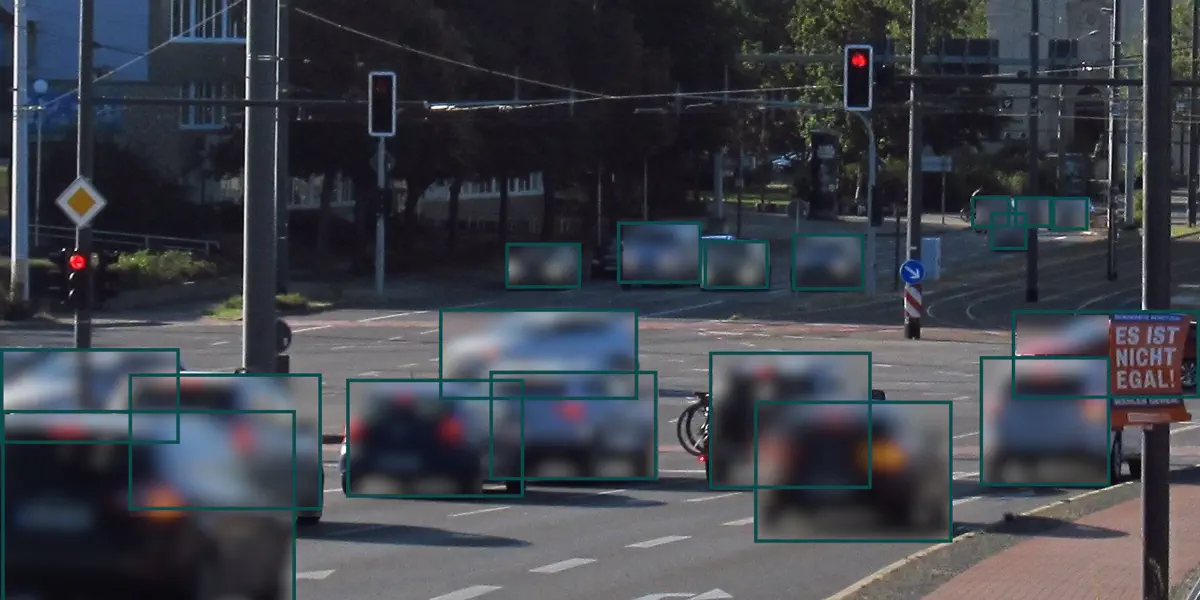
Das Radar erkennt nur einzelne Objekte, ohne Details zu erfassen. So als könnte eine Kamera nur unscharfe Verkehrsteilnehmer aufzeichnen.
Foto: Benedikt Stahl / CC-BY-CA
Anonymität der Daten
Radartechnologie funktioniert, indem sie elektromagnetische Wellen aussendet, die von Fahrzeugen reflektiert werden. Durch die Analyse der reflektierten Wellen kann das System Informationen über den Verkehrsfluss sammeln, ohne personenbezogene Daten zu erfassen. Dadurch wird die Anonymität der Verkehrsteilnehmer gewährleistet. Im Gegensatz dazu können bildbasierte Systeme potenziell sensible Informationen über die Identität von Fahrern und Passagieren erfassen, was bei der Radartechnologie nicht der Fall ist.
Rechtskonformität und Eigenanspruch
Da wir grundsätzlich der Meinung sind, dass persönliche Daten, wo nicht unbedingt notwendig, aus Datensätzen herausgehalten werden sollen, stellte Radar die für uns Ideale Lösung dar. Angenehmer Nebeneffekt war natürlich, dass wir uns so nicht näher mit der Einhaltung der DSGVO beschäftigen mussten. Denn auch wenn die Analyse der Bilddaten nur auf dem Mikrocontroller stattgefunden hätte und sie kein Mensch zu Gesicht bekommen hätte, wären zahlreiche Probleme offen geblieben. Wie stellt man zum Beispiel sicher, dass Dritte sich keinen Zugriff zu den Geräten verschaffen und an noch nicht gelöschte Rohdaten herankommen? Kriegen wir Probleme bei der Akzeptanz des Systems, wenn man das Gefühl hat, man wird auf Kamera aufgezeichnet, nur weil man eine Straße regelkonform entlangfährt. All diese Abwägungen konnten wir mit der Verwendung von Radar guten Gewissens beiseitelegen.
Technische Anforderungen und Vorteile
Was die Radartechnologie an sich betrifft, bringt sich einige Vorteile aber auch viele Herausforderungen mit sich. Kamerabilder sind für Menschen leicht zu begreifen. Die Kontrolle der Auswertemechanismen während der Entwicklung kann dadurch viel leichter und schneller erfolgen. Radar dagegen liefert uns für die Auswertung ein Spektrum, das für ungeübte Betrachter nur sehr schwer zu entziffern ist. Der initiale Aufwand und die Interpretation der Ergebnisse wird also tendenziell mehr Zeit in Anspruch nehmen. Auf lange Sicht arbeitet Radar allerdings zuverlässiger als die Bildauswertung. Radar kümmert es nicht, welche Lichtverhältnisse herrschen. Die reflektierten Wellen sehen bei stockfinsterer Nacht genauso aus wie am helligen Tag. Auch unterschiedliche Wetterbedingungen sind für Radar prinzipiell kein Problem. Nebel, Regen und Schnee sollten, so zumindest die Theorie, beherrschbar sein, sobald der Auswertungsalgorithmus einmal ordentlich darauf eingestellt ist. Wie erfolgreich uns das gelingt, werden wir in den kommenden Blogbeiträgen beschreiben.
Fazit
Mit CitRad werden Verkehrsdaten datenschutzkonform erhoben und zur weiteren Analyse bereitgestellt. Niemand, der an einem CitRad-Sensor vorbeifährt, muss befürchten, dass irgendwo Datensätze entstehen, die mit ihm/ihr in Verbindung gebracht werden. Vor Punkten in Flensburg muss man sich erst recht nicht fürchten. Auch wenn wir Geschwindigkeitsverstöße feststellen, können wir diese lediglich statistisch erfassen und keine Rückschlüsse auf das genaue Auto oder den/die Fahrer:in ziehen. Datenmissbrauch ist somit ebenfalls ausgeschlossen. Was die Genauigkeit der Auswertung angeht, wird es sicherlich noch einige Zeit dauern, bis wir alle Eventualitäten in der Auswertung mit abfangen werden. Bis dahin liefert der CitRad-Sensor aber in jedem Fall schonmal gute Tendenzen und quantitative Übersichten.
CitRad startet beim Prototyp Fund
Es ist Sommer 2024 und wir blicken auf ereignisreiche 12 Monate Hardwareentwicklung zurück. Auch wenn die Hardware in dieser Zeit gut reifen konnte, noch mehr reifte unsere Überzeugung, dass CitRad eine gute Idee ist. Damit unsere Radargerät wirklich Verkehrsverhältnisse verbessern kann, musste zu guter Hard- auch gute Software kommen. Also steckten wir die Köpfe zusammen und überlegten, wie wir CitRad aufs nächste Leven heben könnten. Auch nach Fördermöglichkeiten schauten wir uns um. Eine davon war der Prototype Fund. “Wir fördern Public Interest Tech” ist deren Slogan. Da fühlten wir uns gut aufgehoben. Die Bewerbungsanforderungen waren erfrischend niederschwellig und das Förderkonzept sehr innovationsfreundlich. Wir schickten also die Bewerbung los und warteten…
Citrad in a nutshell. Als Teil des Kickoff-Workshops sollte sich jedes Projekt "kreativ" vorstellen. Das war unser Ergebnis :-)
Photo: Prototype Fund / CC-BY-CA
Erfolgreiche Bewerbung beim Prototype Fund
Als Wochen später die Einladung zum Antragworkshop bei uns eintrudelte, war klar, dass CitRad eines von 25 geförderten Projekte der 16. Runde des Prototypfunds sein wird. Gemeinsam mit den Menschen beim Prototypefund ging es jetzt also darum, den offiziellen Förderantrag beim Bundesministerium für Bildung und Forschung vorzubereiten und einzureichen.
Auch diese Hürde haben wir am Ende genommen, und wurden am 2. September zur Kickoff-Veranstaltung nach Berlin eingeladen. Dort lernten wir die anderen 24 Projekte kennen und konnten wichtige Kontakte knüpfen. Außerdem gabs wichtige Infos zur Förderphase und tags drauf die Präsentationen der Projekte der vorausgegangenen Förderrunde.
Wir freuen uns jetzt intensiv entwickeln zu können und freuen uns auf die nächsten sechs Monate!